官方微信
手机客户端
设为首页
收藏本站
扫一扫,关注我们
QQ登录
微信登录
登录
注册
我的空间
我的消息
我的积分
我的收藏
我的好友
我的相册
我的道具
帐号设置
退出登录
免费发布信息
首页
Portal
新闻资讯
论坛
BBS
城事杂谈
求职招聘
房屋出租
织里跳蚤
房产资讯
关于我们
导读
首页
房产
装修
亲子
婚嫁
美食
汽车
旅游
娱乐
信息
求职
租房
二手房
招聘
拼车
二手车
服务
生活服务
城事杂谈
跳蚤市场
便民服务
社区
城事杂谈
情感天空
户外旅游
房产楼市
装修装饰
美食天地
当前位置:
»
论坛
›
城市服务
›
电脑维修
›
帖子
@所有织里人,这份国庆假期安全提
节前这场新闻发布会聚焦治安与共富
师傅,不好了!“二师兄”掉在高速
[ 电脑维修 ]
江西夫君钓到59斤残疾“水老虎”,放生却
[ 电脑维修 ]
这个时间点吃零食,竟有利于控血糖?!后
[ 房产资讯 ]
要求不要彩礼、不靠父母买房后,于东来再
[ 理财 ]
俄乌升温,离“核”越来越近,全球资金避
[ 理财 ]
美股上涨的核心逻辑:市场赌特朗普不会让
返回列表
发帖
回复
查看:
303
|
回复:
0
科学家研发扫描式激光雷达系统,克服传统激光雷达体积大成本高的局限,有望
[复制链接]
admin
admin
当前在线
积分
311463
关注TA
发消息
发表于 2023-11-20 18:22:24
|
来自:中国浙江湖州
|
显示全部楼层
|
阅读模式
日前,美国西雅图华盛顿大学教授李墨和
团队发明了一种全新的扫描式激光雷达系统,其采用了集成在芯片上的声光散射的技术。
对于扫描式激光雷达来说,一个关键挑战在于如何不使用机械装置,高效可靠地将激光束从系统中发射出来,从而进入自由空间,这样它就能像探照灯一样快速准确地扫描远处的物体。
而在这个新发明的系统中,课题组利用在光子芯片表面的声波,通过声光相互作用,将在片上光波导内传播的激光散射到自由空间当中,而且激光的散射角度完全由光子芯片上声波的波长和频率来控制。
这种新型激光雷达采用了完全集成在光子芯片中的激光束扫描系统,没有任何需要转动的部件,属于全固态激光雷达。
相比机械式激光雷达,全固态激光雷达不仅能提高性能和可靠性,
也大大降低了生产成本和体积,极易于集成和制造,从而克服了传统激光雷达体积大、成本高的局限性,使其具备更广阔的市场应用前景。
相关论文的第一作者李秉钊表示:“虽然声光散射效应已经研究了很久,但是我们对这一现象的创新性应用被审稿人予以高度评价,被认为是这一领域里革命性的突破。我们发明的独特的频率-角度分辨技术,解决了光学相控阵等其他固态激光雷达技术难以解决的角度矫正问题。”
他继续说道,在光子芯片上操纵声波和激光之间的相互作用就像指挥一场“音乐会”,声波是“指挥棒”,而激光就是想展现的整个“乐章”。
通过调整声波的频率,可以将激光散射到任何想要的方向。最终,他们巧妙利用这一现象发明了这种新型激光雷达,它可以使自动驾驶车辆成为现实,在不远的未来,就会改变我们日常生活。
同时,此次研发的扫描系统,因为不需要宽带可调激光器或光梳光源,与其他依赖色散效应来控制散射角度的工作原理相比,被认为具有极大的技术优势。
而随着这种新型激光雷达系统的进一步研发和优化,其在自动驾驶、机器人、无人机等领域的应用将得到进一步推广。
整体来看,集成激光雷达技术在多个领域有着广泛的应用,具体包括:
自动驾驶汽车:自动驾驶汽车是激光雷达最引人关注的应用领域之一。激光雷达可以实时创建周围环境的三维映像,这对于自动驾驶汽车的导航和避障至关重要。全固态集成激光雷达的小巧、轻便和成本效益使其更适合在自动驾驶汽车上使用。
无人机:无人机可以使用激光雷达技术进行地形测绘和导航,特别是在森林、农田或建筑物周围的环境中。
工业自动化:在工厂或仓库中,集成激光雷达可以被用于导航自动化设备,如自动引导车和机器人,并帮助它们避免撞击障碍物。
环境监测和地质学应用:激光雷达技术可用于测量森林覆盖率、监测环境变化、检测地震活动等。
智能家居:在智能家居中,集成激光雷达可以帮助智能扫地机器人准确地导航并规划清洁路径。
增强现实和虚拟现实:激光雷达可以帮助创建更为真实和准确的三维环境,从而改善用户体验。
“这些都是集成激光雷达的一些应用例子,其实潜在应用场景远不止这些,未来随着技术的进步和成本的降低,我们期待有更多领域可以利用集成激光雷达技术。”李秉钊表示。
日前,相关论文以《基于芯片级声光束控制的频率-角度分辨 LiDAR》(Frequency–angular resolving LiDAR using chip-scale acousto-optic beam steering)为题发在 Nature 上。论文少见地仅有三名作者,李秉钊和林齐萱是共同一作,李墨教授担任通讯作者。
该课题组计划下一步增强器件性能,目标是将其扫描距离从目前的 115 米增加到 300 米。在一年之内,该团队打算开发一个可以从实验室带出去,在繁忙街道上进行真实世界三维成像测试的原型机。
近年来,随着现代新能源汽车以及 5G 无线通讯、人工智能(AI)技术和基础设施的逐渐普及,自动驾驶汽车的发展步伐真正逐步加快。高等级(L3+)的自动驾驶汽车需要能够准确地感知周围环境,包括远处的物体和障碍物。而激光雷达便是实现这一功能的必要组件。激光雷达相当于自动驾驶汽车的眼睛,它能分辨目标物体的方位、距离、甚至速度。
相比基于摄像头的视觉感知,激光雷达具有多方面的优势:
首先,激光雷达在各种天气和光照条件下都能提供稳定的性能,而摄像头则可能受到恶劣天气和光线条件的影响。
其次,激光雷达能实时的构建环境的三维模型,并精确测量物体的距离和大小,这是摄像头无法做到的。特别在高速驾驶时,激光雷达的长距离感知能力,对于提早发现障碍物至关重要。
此外,激光雷达和摄像头可以相互补充,结合激光雷达的深度感知和摄像头的颜色识别以及纹理识别,能构建更全面准确的环境模型,从而用于复杂的城市驾驶场景。
目前的激光雷达虽然具有显著的优点,但也存在一些问题和挑战:
其一,现有激光雷达设备通常体积较大且较重,不易集成到汽车或无人机等移动设备上。
其二,它们通常包含机械旋转部件,这些部件的可靠性和使用寿命都主要的障碍和问题。
其三,在技术层面,现有激光雷达虽然可以提供高分辨率的三维图像,但其扫描范围和速度仍有待提高。特别是在高速行驶的情况下,现有的激光雷达尚无法提供足够的感知距离和响应时间。
其四,对于软件和算法来说,处理和解析激光雷达数据也是一大挑战。尽管有很多先进的算法可以从激光雷达数据中提取有用信息,但这通常需要大量的计算资源,并且需要在实时性和准确性之间进行权衡。最后,虽然激光雷达的性能优于摄像头,但其高昂的成本使得其在大规模商业化方面受到限制。
总的来说,虽然现有激光雷达在自动驾驶和其他应用中发挥了关键作用,但它们仍然存在一些技术和经济方面的挑战,需要进一步的研究和创新。
多年来,由李墨教授领导的光子系统实验室,主要关注集成光子设备、光电材料和量子现象,研究兴趣涵盖从基础物理到工程应用的各个方面。在关注到上述问题之后,他们开展了本次研究。
最初,他们的研究目标是利用声光相互作用来设计和制造一个“光子引擎”,专门用来控制冷原子阵列,以解决在制造和应用冷原子量子计算机时面临的规模化问题。
在这个阶段,课题组的所有实验设计都以服务于冷原子量子计算机为目标,包括对波长的选择以及为优化系统而进行的参数调整。
然而,当该团队开始深入研究声光系统的优势时,发现它不仅可以满足量子技术应用的需求,其作为一个激光扫描系统,还能够扩展到激光雷达之中。
这主要是因为声光相互作用具有独特的频移效应,这一效应在激光雷达的应用中,极大提升了声光激光雷达在探测回波角度的能力。
因此,该团队决定将一部分研究重心从光子引擎转向激光雷达。期间,他们首先使用计算机仿真来确定所需的材料,
然后通过创新设计,大大简化了对于生产过程的需求,使得设备变得更加简单,更容易进行大规模生产。
当制作完成相应的光子芯片后,课题组开始了测量工作。一开始,他们通过在摄像头中捕捉到信号,然后利用光电传感器,通过在示波器上观察到的相干光频率测量信号,一步步收集和分析实验数据。
在解决一系列发射端和接受端的技术难题之后,他们成功展示了一个完整的全频域测量激光雷达系统。
李秉钊表示:“虽然这项技术在原理上是简洁的,但在初步探索光束扫描和频角分辨的测量系统时,我们也遇到了许多困难,一度让我们感到有些迷茫。”
有许多次,当他们感到希望近在眼前,但因为测量装置的不完善,在实验室从早上对实验改进、测量、工作到第二天凌晨,最终一无所获。
“而我们的导师李墨老师对这项技术非常有信心,和我们一起分析技术难题,寻找解决方案。最终在我们的共同努力下,在较短时间内,我们攻克了一个个难点,成功的实现了这项激光雷达技术。”李秉钊说。
担任共同一作的林齐萱则表示:“这个项目中,最令我印象深刻的是声光波束偏转技术完美地满足了固态激光雷达的需求。而且,运用奇妙的光波与声波相互作用的物理效应,我们可以在频率空间中重构出三维点云来‘看到’世界。当我们实现了用一个指甲盖大小的芯片就可以成像实验室里的普通物体时,我感到相当的兴奋。”
李墨补充称:“我们的激光雷达技术与现有技术截然不同,拥有很多技术优势,且成本低,易于大规模生产。所以我们对它的商业化前景充满乐观态度。目前学界和业界均有不少感兴趣的人士前来和我们接触。”
当下,他们正在筹集资金进一步发展这一成果,期望在短时间内构建出适合路测的工程原型机。其也计划在两到三年内成立一家初创公司,以将技术商业化。“我们已经从华盛顿大学的技术转化部门(CoMotion)和华盛顿州研究基金会那里得到了第一步的种子基金。”李秉钊表示。
参考资料:
1.Li, B., Lin, Q. & Li, M. Frequency–angular resolving LiDAR using chip-scale acousto-optic beam steering. Nature 620, 316–322 (2023). https://doi.org/10.1038/s41586-023-06201-6
来源:
https://view.inews.qq.com/k/20230901A05MHW00
免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作!
post_newreply
回复
使用道具
举报
返回列表
发帖
回复
发表回复
高级模式
B
Color
Image
Link
Quote
Code
Smilies
您需要登录后才可以回帖
登录
|
立即注册
点击附件文件名添加到帖子内容中
描述
本版积分规则
发表回复
回帖并转播
回帖后跳转到最后一页
精选推荐
@所有织里人,这份国庆假期安全
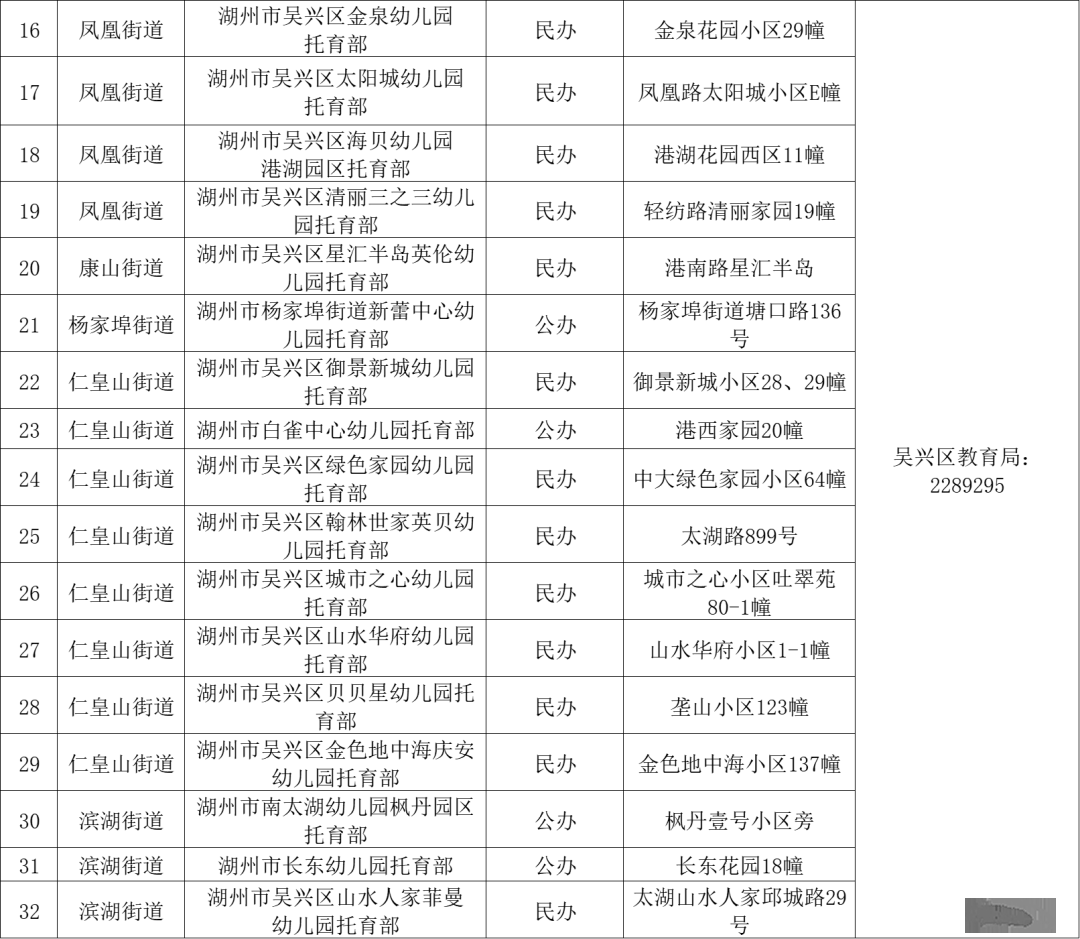
名单公布!
首个全国生态日主场活动在湖州举
2023绿色低碳创新大会在湖州举行
《焦点访谈》关注湖州!
市共同富裕领导小组召开第五次会
织里镇家园志愿广场本周活动预告
防诈骗小课堂,提高警惕!
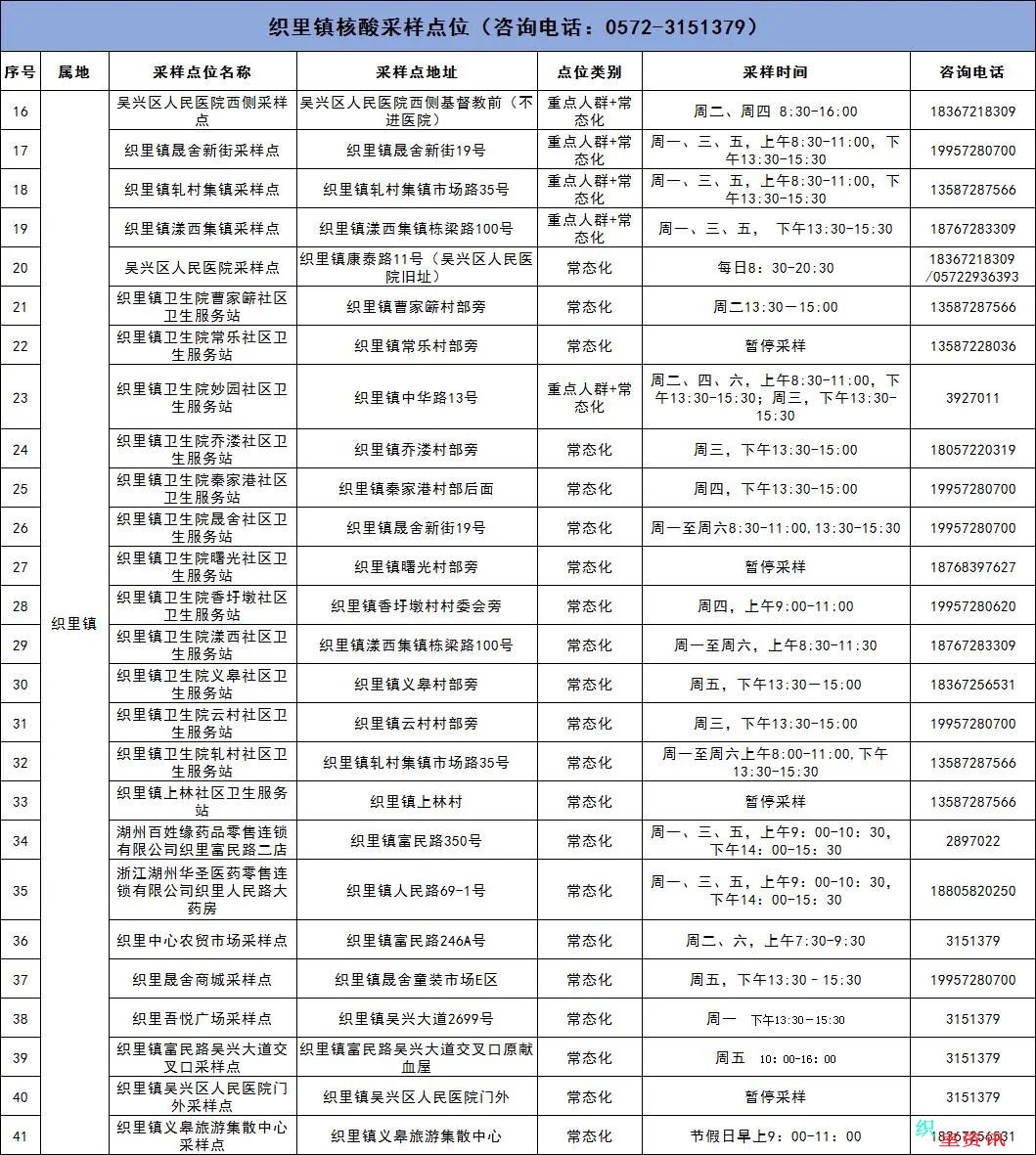
7天1检!常态化核酸检测提醒!
友情链接
浙沪导航
网站目录
关闭
站长推荐
/1
关注织里资讯微信公众号
关注织里资讯微信公众号
查看 »
浙江网络警察报警平台
经营性网站备案信息
湖州市公安局网监备案
不良信息举报中心
联系客服
关注微信
下载APP
返回顶部
返回列表
点击联系客服
在线时间:8:30-17:00
客服电话
13362228119
电子邮件
511400718@qq.com
扫一扫,关注我们
下载APP客户端
 /1
/1